

2023-07-12
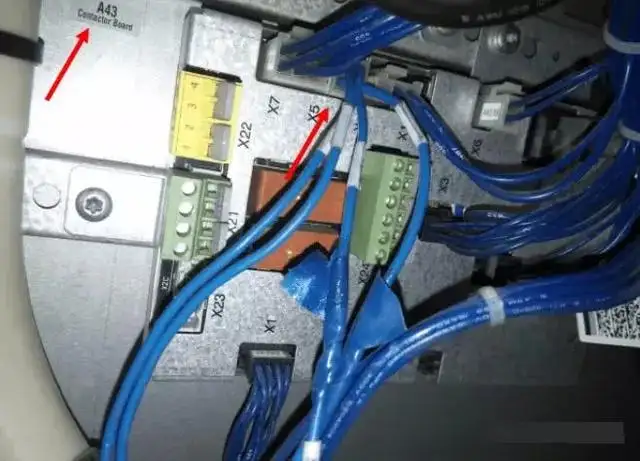
2. Penanganan Korslet Papan Korsleting Modul Daya Robot ABB
Faktor manusia: Hot swapping hardware sangat berbahaya, dan banyak kegagalan papan sirkuit disebabkan oleh hot swapping.Penggunaan kekuatan yang tidak tepat saat memasukkan kartu dan colokan dengan daya dapat menyebabkan kerusakan pada antarmuka, chip, dll., yang menyebabkan kerusakan pada papan sirkuit robot;Seiring bertambahnya waktu penggunaan robot, komponen pada papan sirkuit robot akan menua secara alami, yang menyebabkan kegagalan papan sirkuit robot.
Faktor lingkungan: Karena perawatan yang tidak tepat oleh operator, papan sirkuit robot tertutup debu, yang dapat menyebabkan korsleting sinyal.
3. Kapan perlu mem-backup robot industri
Setelah penyalaan pertama mesin baru.
Sebelum melakukan modifikasi apapun.
3. Setelah menyelesaikan modifikasi.
4. Jika robot industri penting, sebaiknya dilakukan seminggu sekali secara rutin.
5. Yang terbaik adalah membuat cadangan juga di drive USB.
6. Hapus cadangan lama secara teratur untuk mengosongkan ruang hard drive.
4. Bagaimana menangani situasi di mana robot dihidupkan dan liontin pengajaran tetap menampilkan antarmuka berikut
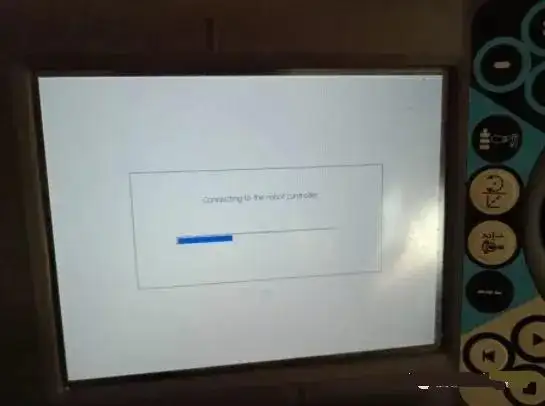 Situasi di atas adalah bahwa tidak ada koneksi komunikasi yang dibuat antara liontin pengajaran dan pengontrol utama robot, dan alasan untuk tidak membuat koneksi meliputi:
Situasi di atas adalah bahwa tidak ada koneksi komunikasi yang dibuat antara liontin pengajaran dan pengontrol utama robot, dan alasan untuk tidak membuat koneksi meliputi:
1. Tuan rumah robot rusak.
2. Kartu CF bawaan (kartu SD) dari host robot rusak.
3. Kabel jaringan antara liontin pengajaran dan host longgar, dll.
Metode pemrosesan: 1. Periksa apakah host normal dan apakah kartu SD di host normal.
2. Periksa apakah kabel jaringan dari liontin pengajaran ke host terhubung dengan benar.
5. Apa arti pengingat waktu pemeliharaan 10106 saat robot menampilkan pesan alarm?
Situasi ini adalah pengingat pemeliharaan berkala cerdas robot ABB.
6. Bagaimana cara menangani malfungsi sistem saat robot memasuki kondisi daya hidup?
1. Mulai ulang robot satu kali.
Jika tidak, periksa liontin pengajaran untuk petunjuk alarm yang lebih mendetail dan ambil tindakan.
3. Mulai ulang.
4. Jika masih tidak bisa dilepas, coba B startup.
5. Jika masih tidak bisa, silahkan coba P startup.
6. Jika masih tidak berhasil, silakan coba saya mulai (ini akan mengembalikan robot ke pengaturan pabriknya, hati-hati).
7. Apakah cadangan robot dapat digunakan bersama oleh beberapa robot?
Tidak. Misalnya, cadangan robot A hanya dapat digunakan untuk robot A, bukan untuk robot B atau C, karena dapat menyebabkan kegagalan sistem.
8. File apa saja yang bisa dibagikan di robot backup?
Jika dua robot memiliki model dan konfigurasi yang sama.Anda dapat membagikan program RAPID dan file EIO, tetapi setelah berbagi, itu juga perlu diverifikasi sebelum dapat digunakan secara normal.
9. Apa asal usul mekanik robot?Dari mana asal mekaniknya?
Masing-masing dari enam motor servo robot memiliki asal mekanis tetap yang unik.Pengaturan asal mekanik robot yang salah akan menyebabkan masalah seperti pergerakan robot yang terbatas atau salah, ketidakmampuan untuk berjalan dalam garis lurus, dan kerusakan serius pada robot.
10. Bagaimana cara menghapus alarm pemantauan tindakan robot 50204?
1. Ubah parameter pemantauan tindakan robot (di menu pemantauan tindakan panel kontrol) agar sesuai dengan situasi sebenarnya.
2. Gunakan perintah AccSet untuk mengurangi akselerasi robot.
3. Kurangi v dalam kecepatan data_ Opsi busuk.
11. Bagaimana cara menangani alarm "50296, perbedaan data memori SMB" saat robot dihidupkan untuk pertama kali?
1. Pilih Kalibrasi dari menu utama ABB.
2. Klik ROB_ 1. Masuk ke layar kalibrasi dan pilih memori SMB.
3. Pilih "Advanced", masuk dan klik "Clear Control Cabinet Memory".
4. Setelah selesai, klik "Tutup" lalu klik "Perbarui".
5. Pilih 'Kabinet kontrol ditukar atau lengan robot, perbarui kabinet kontrol dengan data memori SMB'.
12. Bagaimana cara menyesuaikan kecepatan gerak lintasan robot pada program RAPID?
1. Pilih Data Program dari menu utama liontin pengajaran.
2. Setelah menemukan tipe data Speeddata, klik New.
3. Klik pada nilai awal, dan arti dari empat variabel Speeddata adalah: v_ TCP mewakili kecepatan lari linier robot, v_ Rot mewakili kecepatan rotasi robot, v_ Leax mewakili kecepatan operasi linier sumbu eksternal , v_ Reax mewakili kecepatan rotasi sumbu eksternal.Jika tidak ada sumbu eksternal, dua yang terakhir tidak perlu dimodifikasi.
4. Data yang disesuaikan dapat dipanggil dalam program RAPID.
13. Pemecahan Masalah 6 Kesalahan Umum pada Perbaikan Motor Servo Robot ABB
1. Bagaimana cara menangani kesalahan luapan penghitung kesalahan motor selama putaran kecepatan tinggi?
Motor error counter overflow terjadi selama putaran kecepatan tinggi.
Penanggulangan 1: Periksa apakah pengkabelan kabel daya motor dan kabel enkoder sudah benar dan apakah kabel rusak.
Motor error counter overflow terjadi saat menginput pulsa perintah yang panjang.
Kesalahan luapan penghitung kesalahan motor terjadi selama operasi.
Penanggulangan 2: Tingkatkan nilai pengaturan level luapan dari penghitung kesalahan;Perlambat kecepatan rotasi;Perpanjang waktu akselerasi dan deselerasi;Beban terlalu berat, dan perlu untuk memilih motor berkapasitas lebih besar dari awal atau mengurangi beban, dan memasang organisasi transmisi seperti reduksi untuk menambah beban.
2. Apa yang harus dilakukan jika tidak berfungsi saat ada keluaran pulsa?
Awasi nilai arus keluaran pulsa pengontrol dan apakah lampu keluaran pulsa berkedip, ketahui bahwa pulsa perintah telah dipenuhi dan sekarang keluar secara normal;
Periksa apakah kabel kontrol, kabel daya, dan kabel enkoder dari pengontrol ke driver terhubung dengan tidak benar, rusak, atau dalam kontak yang buruk;
Periksa apakah rem motor servo dengan rem sekarang telah dibuka;
Awasi apakah panel driver servo mengakui input perintah pulsa;
Perintah operasi Jalankan adalah normal;
Formulir kontrol harus memilih formulir kontrol arah;
Apakah jenis pulsa input yang diatur oleh driver servo konsisten dengan pengaturan pulsa perintah;
Pastikan drive sisi rotasi positif dihentikan, sinyal stop drive sisi rotasi, dan sinyal reset penghitung kesalahan tidak dimasukkan, beban terputus, dan operasi tanpa beban normal.Periksa sistem mekanik.
3. Apa yang harus saya lakukan jika tidak ada laporan kelebihan muatan?
Jika terjadi saat sinyal Servo Run tersambung dan tidak ada pulsa yang dipancarkan:
Periksa kabel daya motor servo untuk melihat apakah ada kontak yang buruk atau kerusakan kabel;Jika itu adalah motor servo dengan rem, rem harus dihidupkan;Apakah penguatan putaran kecepatan disetel terlalu tinggi;Apakah konstanta waktu integral dari loop kecepatan diatur terlalu kecil.
Jika servo hanya mengalami malfungsi selama pengoperasian:
Apakah gain dari rangkaian azimuth terlalu tinggi;Apakah amplitudo set penyelesaian pemosisian terlalu kecil;Periksa apakah tidak ada rotor yang terkunci pada poros motor servo dan sesuaikan mesin dari awal.
4. Bagaimana cara mengatasi suara atau getaran yang tidak normal selama pengoperasian?
Kabel servo:
Gunakan kabel daya standar, kabel enkoder, kabel kontrol, dan kabel untuk memeriksa kerusakan;Periksa apakah ada sumber interferensi di dekat garis kontrol, dan apakah sumber tersebut paralel atau terlalu dekat dengan kabel daya arus tinggi terdekat;Periksa apakah ada perubahan potensi terminal pentanahan untuk memastikan pentanahan yang sangat baik.
Parameter servo:
Pengaturan penguatan servo terlalu besar, dan disarankan untuk menyesuaikan parameter servo secara manual atau aktif dari awal;Mengakui pengaturan konstanta waktu dari filter respons kecepatan, dengan nilai awal 0, dimungkinkan untuk meningkatkan nilai yang ditetapkan dengan pengujian;Pengaturan rasio roda gigi elektronik terlalu besar, menganjurkan untuk mengembalikan ke pengaturan pabrik;Resonansi antara sistem servo dan sistem mekanis, menguji dan menyesuaikan frekuensi dan amplitudo filter takik.
Sistem mekanik:
Kopling yang menghubungkan poros motor dan sistem peralatan menyimpang, dan sekrup pemasangan tidak dikencangkan;Pengikatan puli atau roda gigi yang buruk juga dapat menyebabkan perubahan torsi beban.Uji operasi tanpa beban.Jika operasi tanpa beban normal, periksa apakah ada ketidaknormalan pada bagian ikatan sistem mekanis;Akui apakah inersia beban, torsi, dan kecepatan terlalu besar, uji operasi tanpa beban, dan jika operasi tanpa beban normal, kurangi beban atau ganti driver dan motor dengan kapasitas yang lebih besar.
5. Bagaimana menangani kontrol orientasi dan pemosisian yang tidak akurat selama perbaikan motor servo robot ABB?
Pertama, akui apakah nilai pulsa yang dinyatakan sebenarnya dari pengontrol konsisten dengan nilai yang diharapkan, dan jika tidak, periksa dan perbaiki program;
Awasi apakah jumlah perintah pulsa yang diterima oleh driver servo sesuai dengan yang diumumkan oleh controller.Jika tidak, periksa kabel kontrol;Periksa apakah pengaturan bentuk pulsa perintah servo konsisten dengan pengaturan pengontrol, seperti CW/CCW atau arah + pulsa;
Pengaturan penguatan servo terlalu besar, harap sesuaikan penguatan servo secara manual atau aktif dari awal;Motor servo rentan terhadap akumulasi kesalahan selama gerakan bolak-balik.Direkomendasikan untuk menyetel sinyal asal mekanis di bawah kondisi yang diizinkan oleh proses, dan melakukan operasi pencarian asal sebelum kesalahan melebihi skala yang diizinkan;Sistem mekanik itu sendiri memiliki akurasi yang rendah atau organisasi transmisi yang tidak normal (seperti penyimpangan sambungan antara motor servo dan sistem peralatan).
6. Perbaikan motor servo robot ABB, operasi kontrol arah, kesalahan kecepatan dilaporkan.Bagaimana cara menanganinya?
Segera setelah sinyal Jalankan servo terhubung, itu akan memicu: periksa apakah kabel kabel daya motor servo dan kabel enkoder sudah benar dan tidak rusak.
14. Bagaimana robot industri ABB menjalani perawatan rutin?
Sebelum pengoperasian normal "pemeriksaan rem", rem motor pada setiap sumbu perlu diperiksa.Adapun cara pemeriksaan rem motor adalah sebagai berikut :
1. Jalankan sumbu masing-masing lengan robot ke posisi beban maksimumnya.
2. Putar sakelar pemilihan mode motor pada pengontrol robot ke posisi MOTORS OFF.
3. Periksa apakah poros dalam posisi semula.Jika lengan mekanik masih mempertahankan posisinya setelah motor dimatikan, itu menandakan rem dalam kondisi baik.
Bahaya kehilangan fungsi deselerasi (250mm/s).
Jangan mengubah rasio roda gigi atau parameter gerakan lainnya dari komputer atau perangkat pengajaran.Ini akan memengaruhi fungsi operasi deselerasi (250 mm/dtk).
15. Beberapa hal yang perlu diperhatikan dalam menggunakan alat peraga secara aman:
Tombol perangkat pengaktifan yang terpasang pada liontin pengajaran, saat ditekan setengah, mengubah sistem ke mode MOTORS ON.Saat tombol dilepas atau ditekan penuh, sistem berubah ke mode MOTORS OFF.
16. Agar dapat menggunakan alat peraga dengan aman, prinsip-prinsip berikut harus diikuti:
1.Ketika tombol perangkat Pengaktifan tidak dapat kehilangan fungsinya selama pemrograman atau debugging, dan robot tidak perlu bergerak, segera lepaskan tombol perangkat Pengaktifan.
2. Saat personel pemrograman memasuki area aman, mereka harus selalu membawa liontin pengajaran di tubuhnya untuk mencegah orang lain memindahkan robot.
17. Saat bekerja dalam jangkauan kerja lengan robot, hal-hal berikut harus diperhatikan:
1. Sakelar pemilihan mode pada pengontrol harus diputar ke posisi manual untuk mengoperasikan perangkat yang memungkinkan untuk memutuskan sambungan komputer atau mengoperasikan dari jarak jauh;
2. Saat sakelar pemilihan mode aktif
3. Perhatikan sumbu rotasi lengan robot, berhati-hatilah saat rambut atau pakaian tercampur.Perhatikan juga komponen atau perlengkapan lain yang dipilih pada lengan robot;
4. Periksa rem motor masing-masing sumbu.
18. Sentuh penyimpangan
Fenomena 1: Posisi yang disentuh jari tidak sesuai dengan panah mouse.
Alasan: Setelah menginstal program driver, teaching pendant tidak menyentuh bagian tengah posisi mata banteng secara vertikal selama kalibrasi.
Solusi: Kalibrasi ulang posisi.
Fenomena 2: Beberapa area memiliki sentuhan yang akurat, sementara yang lain memiliki sentuhan yang menyimpang.
Penyebab: Sejumlah besar debu atau kerak terakumulasi pada garis refleksi akustik di sekitar layar sentuh gelombang akustik Surface, yang memengaruhi transmisi sinyal akustik.
Solusi: Bersihkan layar sentuh, berikan perhatian khusus untuk membersihkan garis-garis pantulan gelombang suara di semua sisi layar sentuh.Saat membersihkan, lepaskan catu daya kartu kontrol layar sentuh.
19. Pengajaran sentuhan liontin tidak ada respon
Fenomena: Saat menyentuh layar, panah mouse tidak bergerak dan tidak ada perubahan posisi.
Alasan: Ada banyak alasan untuk fenomena ini, sebagai berikut:
1. Debu atau kerak yang terakumulasi pada garis refleksi akustik di sekitar layar sentuh gelombang akustik Permukaan sangat serius, menyebabkan layar sentuh gagal berfungsi;
2. Kerusakan layar sentuh;
3. Kartu kontrol layar sentuh tidak berfungsi;
4. Garis sinyal layar sentuh tidak berfungsi;
5. Port serial host tidak berfungsi;
6. Sistem operasi dari liontin pengajaran tidak berfungsi;
7. Kesalahan penginstalan driver layar sentuh.
Solusi: Amati lampu indikator sinyal layar sentuh, yang berkedip secara teratur dalam keadaan normal, kira-kira sekali per detik.
Saat menyentuh layar, liontin pengajaran menjadi hitam, yang merupakan masalah rumit.Jika lampu latar hemat energi diatur, layar hitam normal;Jika kata kedua di area kontrol sistem dioperasikan secara tidak sengaja, layar juga akan menjadi hitam.Jika dua poin pertama dikecualikan, perbarui ke firmware terbaru untuk ditinjau.
Kirimkan pertanyaan Anda langsung kepada kami

